(通讯员 巨雨薇)5月21日,国际权威期刊《纳米能源》(Nano Energy)在线刊发了国家脉冲强磁场科学中心李亮教授团队题为“可重构多运动模态磁性软体机器人”(Reconfigurable Magnetic Soft Robots with Multimodal Locomotion)的研究论文。我校为论文唯一完成单位,中心博士生巨雨薇、硕士生谢延为论文共同第一作者,李亮教授和曹全梁副研究员为论文共同通讯作者,硕士生姚建鹏、博士后李潇翔、吕以亮副研究员以及韩小涛教授参与了相关研究工作。
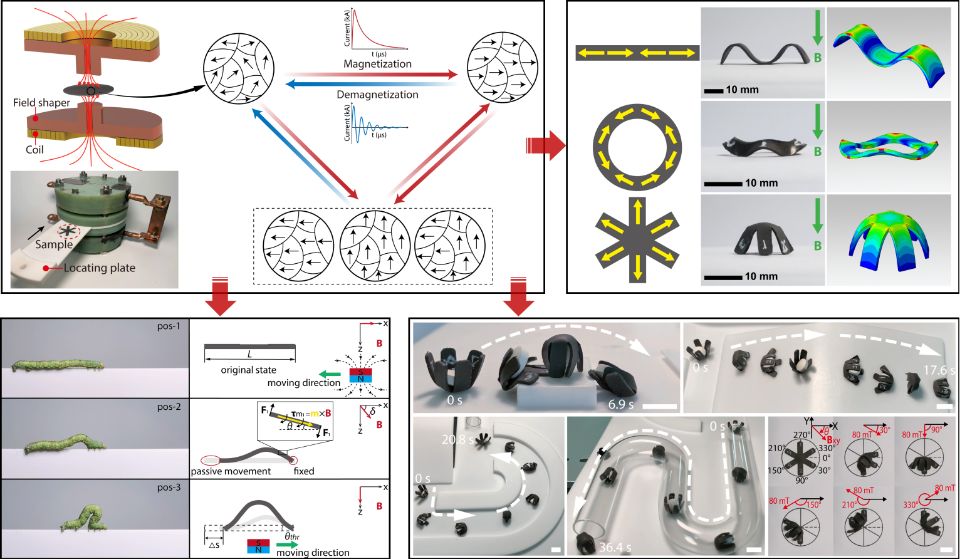
可重构磁控软体机器人原理及应用
软体机器人具有无限自由度、强连续变形能力和强适应性等特征,在医疗康复、仿生和柔性抓取等多领域已展现出广阔的应用前景。其中,磁控软体机器人技术具有非接触、可控性强和穿透性能好等显著优势,已成为软体机器人领域的研究前沿和热点。然而,现阶段磁性软体机器人的大多数磁化模式受限于固定模具或固有地耦合到材料制造工艺中,难以实现可重构和高通量的磁化调控,相关技术突破极具挑战。
该研究中,李亮教授团队首创基于脉冲强磁场聚焦的直接磁化技术,实现了磁性软体机器人内部磁化过程与磁性复合材料制备工艺过程的解耦,可完成软体机器人内部磁化路径快速可控编程及重构(毫米级分辨率),是目前唯一无需额外辅助措施(模具、组装或外加取向场等)实现小型软体机器人可编程磁化的方法。同时,李亮教授团队提出新的磁驱动策略,实现了多类功能型磁性软体机器人的多模态变形和运动,包括无约束抗拖拽软体机器人,移动速度超过1倍身长/秒的仿尺蠖软体机器人(已报道最快的磁性尺蠖软体机器人)以及在非结构环境中实现靶向运输的多臂滚动软体机器人。相关研究对于实现磁性软体机器人的批量生产,推动其在生物医疗和仿生等领域中的应用具有重要意义。

无约束抗拖拽软体机器人与仿尺蠖软体机器人
该研究工作得到了国家自然科学基金创新研究群体项目(51821005)和中国科协青年人才托举工程项目(2018QNRC001)的支持。
论文链接:https://www.sciencedirect.com/science/article/pii/S2211285521004250