Reconfigurable magnetization process and multimodal shape transformation
( Nano Energy 2021, 106169, https://doi.org/10.1016/j.nanoen.2021.106169)
Background
Soft robots,due to their abundant advantages in terms of scalability, flexibility, and adaptability,have garnered increasing attentions for potential applications in biomedical, bioengineering, bionics, automation, and industry. Among them, the magnetic soft robot technology holds the most promise owing to its advantages of non-contact manipulation, strong controllability, and good penetration performance. However, despite recent progress, current magnetizing approaches for these magnetic soft robots are limited to fixed template or inherently coupled to sequential fabrication processes, preventing reprogrammability and high-throughput. Relevant technological breakthroughs still remain challenging.
What are the main contributions of this work?
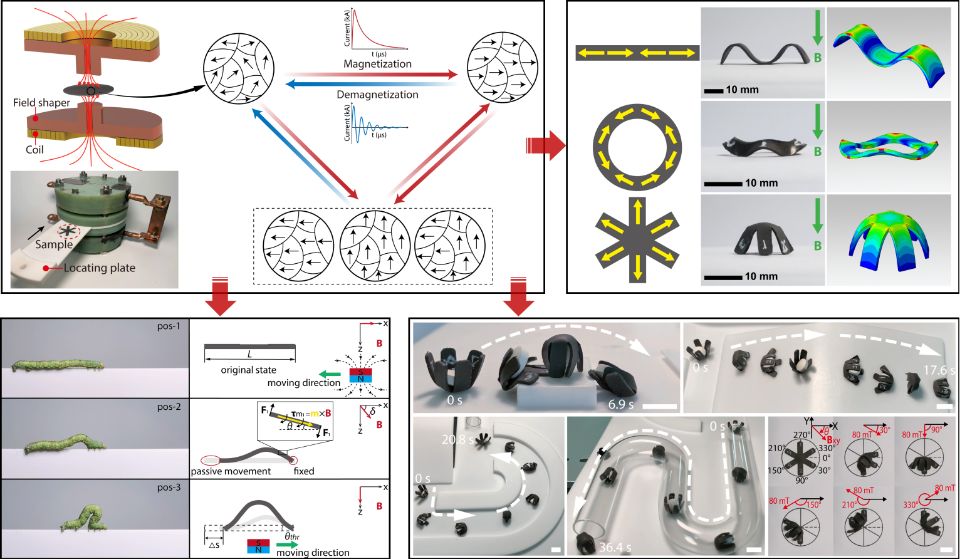
1. A direct magnetization method based on pulsed high magnetic field focusing was developed, where the local magnetization distribution can be programmed flexibly and reconfigurably within millimeter-scale resolution.The magnetization process of soft magnetic composites is inherently decoupled from their fabrication process, which implies that after fabrication, the magnetization could still be programmed flexiblysuch asre-magnetizing, demagnetizing, multi-directional magnetizing.
2. A fishing soft robot to resist the dynamic drag of the fish in the water was developed. The fishing robot realizes the cooperation of local static and dynamic motion modes by combining magnetization components parallel to and perpendicular to the applied magnetic field.
3. An inchworm-inspired magnetic soft robot capable of two-way locomotion (crawling forward and backward) with a speed of more than 1 body/s was developed. Compared with the existing inchworm-like magnetic soft robots, the robot has the simplest structure and the fastest locomotion speed.
4. A six-arm rolling magnetic soft robot was developed to transport objects in complex environments. The soft robot carrying a pill features multiple capabilities such as, climbing over an obstacle, climbing up and down a slope, turning towards any two-dimensional direction, and passing through an S-shaped glass tube.
Overall, the developed magnetic soft robots, together with the proposed magnetization method, are expected to pave avenues for the future development of mass production and controllable magnetization of soft robots for practical applications.
Why did we need WHMFC?
In this research, WHMFC provides a stable and reliable pulsed power supply system and mature pulsed magnet design and manufacturing technology, which helps us to develop the reconfigurable magnetization system to achieve flexible control of the internal magnetizationprofilesin magnetic soft robots.
Who did the research?
Yuwei Jua,b,†, Run Huc,†, Yan Xiea,b,†, Jianpeng Yaoa,b, Xiaoxiang Lia,b, Yiliang Lva,b, Xiaotao Hana,b, Quanliang Caoa,b,*and Liang Lia,b,*
aWuhan National High Magnetic Field Center, Huazhong University of Science and Technology, Wuhan, 430074, China
bState Key Laboratory of Advanced Electromagnetic Engineering and Technology, Huazhong University of Science and Technology, Wuhan, 430074, China
cState Key Laboratory of Coal Combustion, School of Energy and Power Engineering, Huazhong University of Science and Technology, Wuhan, 430074, China
†These authors contributed equally to this work.
*Corresponding author. E-mail address:quanliangcao@hust.edu.cn(Quanliang Cao);Liangli44@hust.edu.cn(Liang Li)
Funding
This work was supported by the National Natural Science Foundation of China (51821005), the Young Elite Scientists Sponsorship Program by CAST (YESS, 2018QNRC001).
Link
https://www.sciencedirect.com/science/article/pii/S2211285521004250

